|
Transmission d'une grandeur analogique |



3.2: Transmettre la grandeur "A0" vers la carte Raspberry.
Présentation
Nous avons maintenant un bus I2C opérationnel. Pour transmettre cette grandeur vers la carte Raspberry,
on va écrire deux programmes :
Le premier résidera dans la carte Arduino.
Ce programme répondra à une demande de la carte Raspberry (Maître de la communication) en envoyant les deux octets constitutifs de la valeur numérique de l’entrée A0 soit valA0h et valA0l, la carte Arduino étant esclave, elle doit répondre immédiatement au maître et le fera grâce à une interruption du bus i2c qui déclenchera le sous-programme de transmission d’une donnée (d'un octet). Le programme principal de la carte Arduino fera l’acquisition de l’entrée analogique A0 (valA0) périodiquement.
Le programme écrira dans la console Arduino la valeur de l'entrée analogique et les valeurs transmises, pour vérifier le bon fonctionnement du programme.
Ce programme doit réaliser les opérations suivantes :
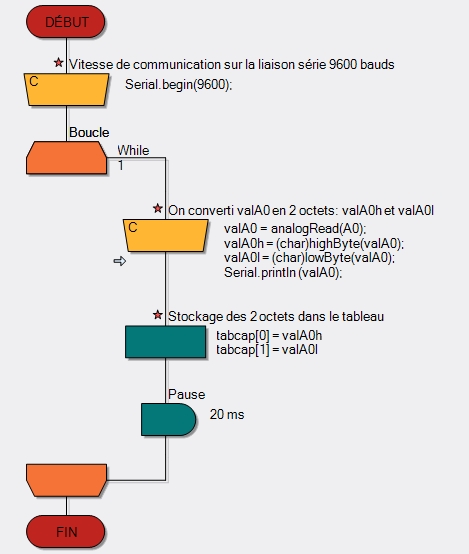
1 : Mesurer VA0 et stocker la valeur numérique de l’entrée analogique A0 (50 fois par seconde)
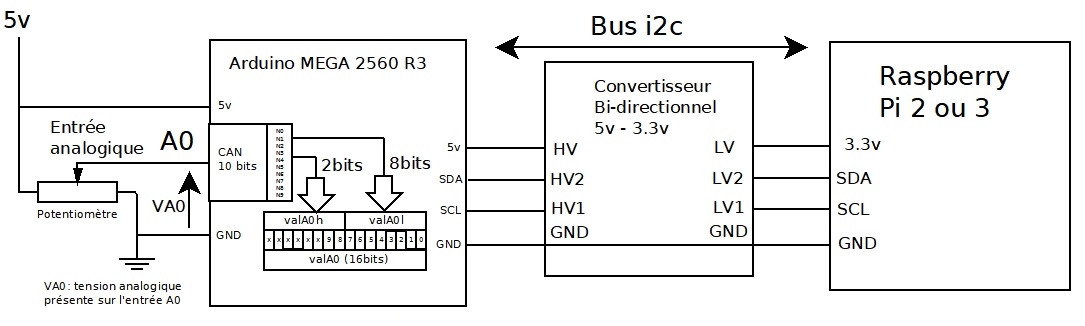
La tension analogique présente sur l’entrée A0 (VA0 sur le schéma réalisée avec un potentiomètre) est convertie en une valeur numérique « valA0 » grâce à un CAN (Convertisseur Analogique Numérique 10 bits) interne au micro contrôleur de la carte MEGA 2560 R3 par l'exécution de l’instruction : valA0 = analogRead(A0);
Cette valeur numérique valA0 sera stockée en mémoire dans une variable de type int (integer, entier) codée sur 16bits.
La valeur valA0 étant codée sur 16bits (CAN 10 bits oblige), pour la transmettre, il faudra la séparer en deux octets car sur le bus i2c on transmet des octets (voir schéma de principe ci-dessus) :
valA0h (octet de poids fort de la conversion, 2 bits significatifs)
valA0l (octet de poids faible, 8 bits significatifs).
Les deux octets seront stockés dans un tableau de deux valeurs afin d'être récupérés par la procédure de transmission sur le bus i2c.
Voici une représentation graphique de cette procédure (sous Flowcode v7)
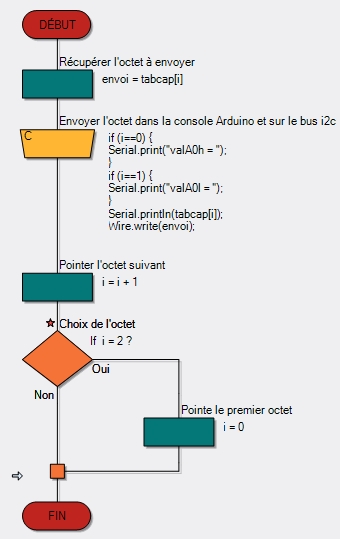
2 : Développer la procédure d’émission de donnée du bus I2C. "sendData"
Cette procédure et un sous-programme il sera exécuté sur une interruption du bus i2c (start).
Il faudra exécuter deux fois la procédure pour envoyer successivement les deux octets du résultat de la conversion (1 octet par transmission).
La procédure d'émission doit pouvoir distinguer quelle octet elle doit transmettre?
On utilisera un index "i" qui pointera la donnée dans le tableau.
La procédure gérera ce pointeur (i) afin d'envoyer alternativement les deux octets du tableau (valA0h et valA0l), à chaque sollicitation de la carte Raspberry.
Voici une représentation graphique de ce sous-programme Émission bus i2c (sendData)
Le deuxième résidera dans la carte Raspberry.
Pour copier le programme dans la carte Raspberry j'utilise le logiciel WinSCP, il faut copier le fichier python dans le répertoire home/pi.
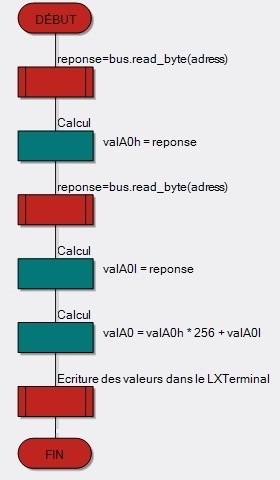
On va écrire un petit script en python qui permettra de récupérer les deux octets valA0h et valA0l.
On calculera la valeur valA0 à partir des valeurs reçues : valA0h et valA0l
Le résultat du calcul et les valeurs reçues seront écrits dans la console (LXTerminal) à chaque exécution de ce script.
Présentation du programme écrit en python:
Il permet de réceptionner les deux octets (valA0h et valA0l) de la grandeur valA0 via le bus i2c.
"valA0" contient le résultat de la conversion de l'entrée analogique A0 sur une carte Arduino MEGA 2560 R3
"valA0h" correspond à l'octet de poids fort
"valA0l" correspond à l'octet de poids faible
Le programme réalise 2 lectures sur le bus (pour récupérer les 2 octets), une lecture est décomposée en 2 temps:
1 temps: Émission de l'adresse de la carte Arduino avec un bit R/W = 1 pour lui signifier que l'on veut récupérer un octet.
La carte Arduino doit imposer un niveau bas pendant la période Ack pour signaler sa présence.
2 temps: Réception de l'octet.
Chaque lecture sera encadrée par un start et un stop:
Voici une représentation graphique de ce programme Python Réception bus i2c
3.21 Procédure Arduino (Ouvrir le logiciel Arduino)
Le programme de la carte Arduino sera sauvegardé sous le nom : « A0_i2c_VotreNom.ino »
Copier/coller le listing suivant dans l'interface Arduino et téléverser le.
Listing procédure "A0_i2c_VotreNom.ino"
/* Nom du programme : A0_i2c_VotreNom.ino
* Programme test de la liaison I2C entre la carte Raspberry et la carte Arduino.
* Auteur:
* Date:
* Le Raspberry est maître de la communication et l'Arduino esclave.
* Utilisation de la librairie Wire:
* https://www.arduino.cc/en/Reference/Wire
* http://www.mon-club-elec.fr/pmwiki_reference_arduino/pmwiki.php?n=Main.LibrairieWire
* Programme minimum pour déclarer le bus i2c:
* L'adresse de la carte Arduino est déclaré en hexadécimale.
*/
#include <Wire.h>
#define SLAVE_ADDRESS 0x10// Déclaration de l'adresse de la carte Arduino ici 16 en décimale
int valA0 = 0; // valeur de conversion de l'entrée A0 sur 16 bits
byte valA0h = 0; // Octet de poids fort de valA0
byte valA0l = 0; // Octet de poids faible de valA0
int tabcap[2] = {valA0h,valA0l}; //tableau de 2 valeurs
int i=0; //index du tableau
// Initialisation
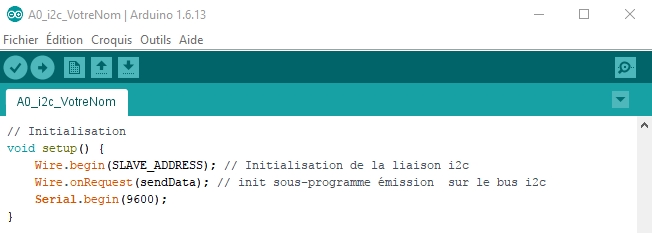
void setup() {
Wire.begin(SLAVE_ADDRESS); // Initialisation de la liaison i2c
Wire.onRequest(sendData); // init sous-programme émission sur le bus i2c
Serial.begin(9600); // Fixe la vitesse de communication sur le port série (USB ici) à 9600 baud.
}
// Programme principal
void loop() {
valA0 = analogRead(A0); // Conversion de l'entrée A0, converti en un integer sur 16 bits (int val=).
Serial.println (valA0); // Écriture de la valeur "val" sur le terminal (via la liaison série USB).
valA0h = (char)highByte(valA0); // Isolation de l'octet de poids fort.
tabcap[0] = valA0h; // Stockage dans le tableau, attention [0] correspond à la première case du tableau.
valA0l = (char)lowByte(valA0); // Isolation de l'octet de poids faible.
tabcap[1] = valA0l; // Stockage dans le tableau, attention [1] deuxième case.
delay(20);
}
// Sous-programme émission bus i2c
void sendData(){
int envoi = tabcap[i]; // envoi contient l'octet à transmettre
if (i==0) { // écrire dans la console Arduino l'octet transmis
Serial.print("valA0h = "); // son nom
}
if (i==1) {
Serial.print("valA0l = "); // son nom
}
Serial.println(tabcap[i]); // sa valeur
Wire.write(envoi); // émission de l'octet sur le bus
i=i+1; // pointe l'octet suivant
if (i==2) { // initialiser le pointeur
i=0; // si on dépasse le tableau
}
}
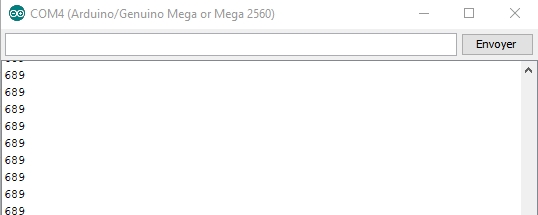
Ouvrir la console (cliquer sur l’icône ![]() ) dans l'interface Arduino :
) dans l'interface Arduino :
Vous obtenez dans la console la valeur de valA0 qui défile (ici 689).
Actionner votre potentiomètre pour vérifier son bon fonctionnement :
(Contrôler la plage de variation théoriquement 0 à 1023, CAN 10bits).
3.22 Procédure Raspberry (python)
Maintenant que le programme Arduino fonctionne on s'occupe de celui de la carte Raspberry.
Copier/coller le listing qui suis dans un éditeur de texte.
Sauvegarder ce fichier sous le nom : « A0_i2c_VotreNom.py »
Utiliser WinSCP pour stocker ce fichier dans le répertoire "home/pi/" de votre carte Raspberry
Listing procédure "A0_i2c_VotreNom.py"
# Nom du programme : A0_i2c_VotreNom.py
import smbus
import time
valA0h = 0 # Declaration et initialisation des variables du programme
valA0l = 0
valA0 = 0
bus = smbus.SMBus(1) # Declaration du bus i2c et initialisation de l'adresse de la carte Arduino (esclave) ici 0x10 soit 16 en decimale
address = 0x10
reponse = bus.read_byte(address) #Lecture du premier octet valA0h
valA0h = reponse
reponse = bus.read_byte(address) #Lecture du deuxieme octet valA0l
valA0l = reponse
valA0 = valA0h*256 + valA0l # On calcul la valeur 16bits valA0
print "valA0 =", valA0 # On affiche dans le console le resultat du calcul et les deux valeurs recues valA0h et valA0l
print "valA0h =", valA0h
print "valA0l =", valA0l
3.23 Essais
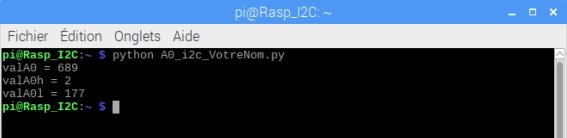
Il ne reste plus qu'à exécuter ce script dans la console Raspberry.
Ouvrir la console (LXTerminal) et taper la ligne de commande suivante :
"python A0_i2c_VotreNom.py"
Vous devez obtenir l'affichage des 3 valeurs dans le LXTerminal
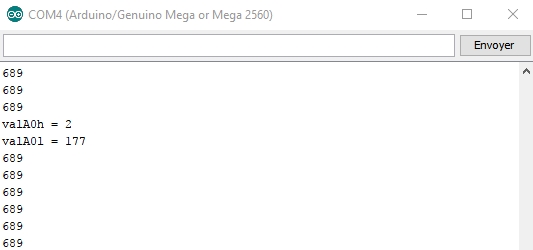
Vous obtenez en concordance de temps dans la console Arduino :
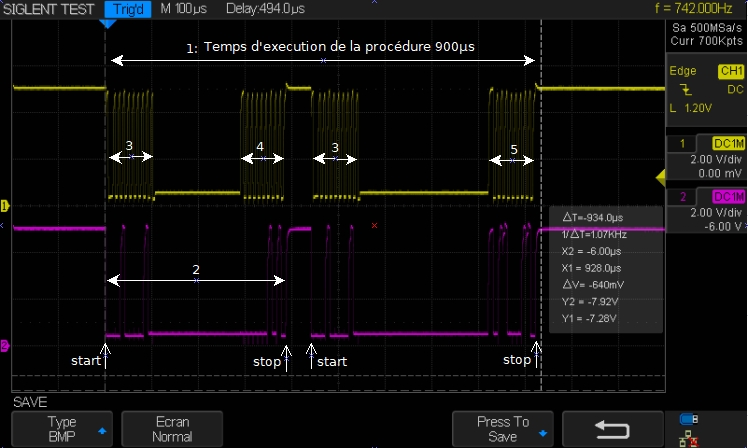
Un relevé temporel des 2 lectures successives sur le bus i2c a donné:
1: Le temps d'exécution de la procédure python est d'environ 900 µs.
2: Temps de transmission d'un octet (première lecture)
3: Temps d’émission de l'adresse (ici 10H soit 16 en décimale), voir listing programme ligne 9.
4: Réception du premier octet (valA0h)
5: Réception du deuxième octet (valA0l)
Analyse des 2 lectures enregistrées:
2: Réception du premier octet (valA0h)
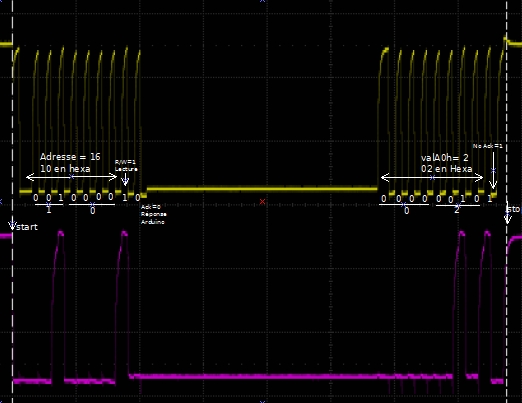
2: Réception du deuxième octet (valA0l)
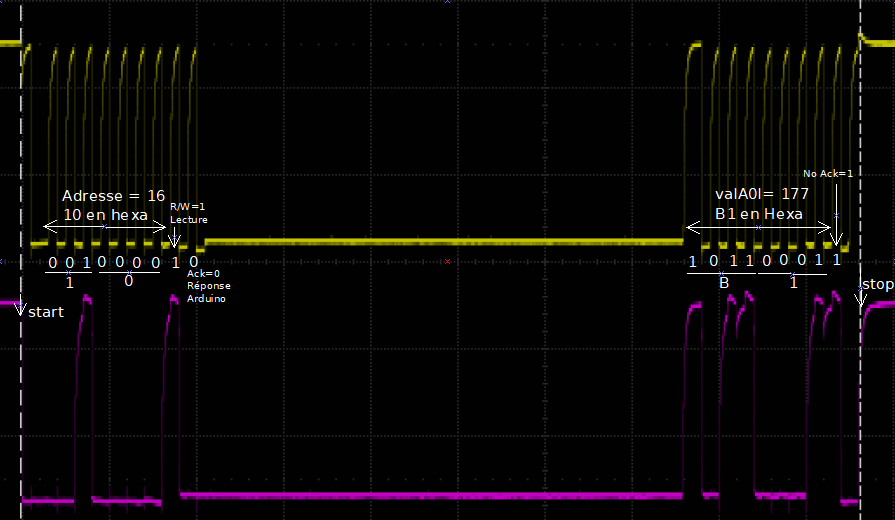
3.24 Essais Multiples :
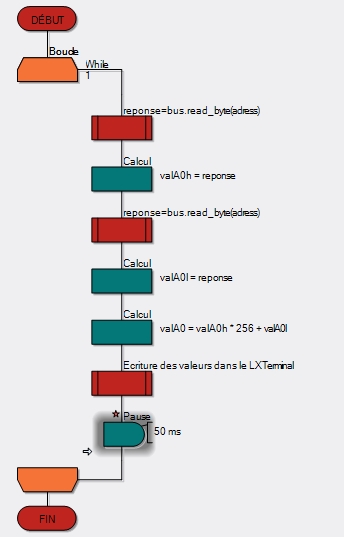
La procédure python étant opérationnel, on va la rendre périodique.
On l'intègre simplement dans une boucle et on ajoute une temporisation afin de régler la fréquence des lectures.
Voici une représentation graphique de ce programme Python Réception bus i2c qui boucle :
Copier/coller le listing qui suis dans un éditeur de texte.
Sauvegarder ce fichier sous le nom: « A0_i2c_boucle_VotreNom.py »
Utiliser WinSCP pour stocker ce fichier dans le répertoire "home/pi/" de votre carte Raspberry
Listing procédure "A0_i2c_boucle_VotreNom.py"
# Nom du programme: "A0_i2c_boucle_VotreNom.py"
# -*- coding: ISO-8859-1 -*- # compatibilité du jeu de caractère
import smbus
import time
valA0h = 0 # Déclaration et initialisation des variables du programme
valA0l = 0
valA0 = 0
bus = smbus.SMBus(1) # Déclaration du bus i2c et initialisation de l'adresse de la carte Arduino (esclave) ici 0x10 soit 16 en décimale
address = 0x10
while 0==0: #boucle infinie la condition est toujours vraie ( 0 = 0 )
reponse = bus.read_byte(address) #Lecture du premier octet valA0h
valA0h = reponse
reponse = bus.read_byte(address) #Lecture du deuxième octet valA0l
valA0l = reponse
valA0 = valA0h*256 + valA0l # On calcul la valeur 16bits valA0
print "valA0 =", valA0 # On affiche dans le console le résultat du calcul et les deux valeurs reçues valA0h et valA0l
print "valA0h =", valA0h
print "valA0l =", valA0l
time.sleep(0.05) # Temporisation (50ms) avant de relancer une acquisition ici 20 fois par seconde
Il ne reste plus qu'à exécuter ce script dans la console Raspberry.
Ouvrir la console et taper la ligne de commande suivante:
"python A0_i2c_boucle_VotreNom.py"

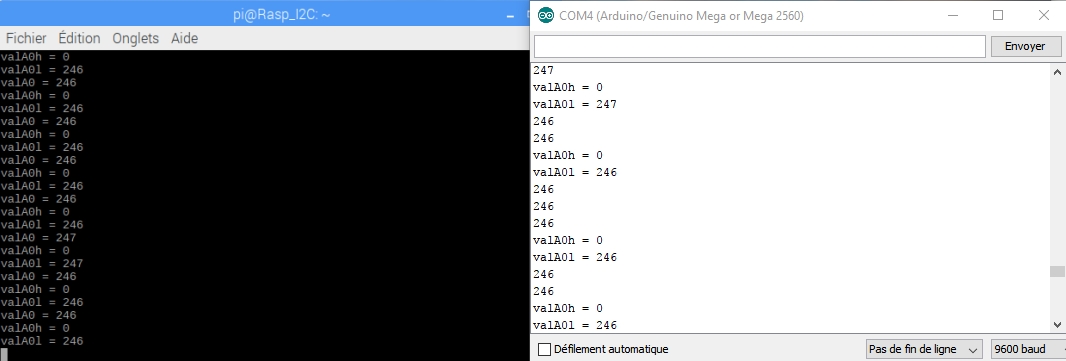
Vous devez obtenir en boucle l'affichage des 3 valeurs dans le LXTerminal de la carte Raspberry.
Coté Arduino l'affichage dans la console montre une succession d'affichage de la donnée (valA0) suivi lorsque que la carte Raspberry l’interroge des valeurs de valA0h et valA0l respectivement.
Un résumé dans cette image qui concatène les deux consoles:
Vous avez peut-être remarqué, dans le listing python du programme A0_i2c_boucle_VotreNom.py, j'ai utilisé des caractères accentués dans mes commentaires.
Chose que je n'ai pas faite dans le premier programme, j'ai juste rajouté dans le programme, à la première ligne, la déclaration suivante:
# -*- coding: ISO-8859-1 -*- # compatibilité du jeu de caractère
J'ai trouvé la solution sur ce site: https://info.sio2.be/python/1/9.php
Créé avec HelpNDoc Personal Edition: Générateur de documentation iPhone gratuit