|
Étude Dynamique du Bus I2C |



4 : Étude Dynamique (Rpmax)
Relevé effectué avec un résistor Rp = 1.72KΩ mesuré ( 10KΩ // 10KΩ // 2,7KΩ = 1,753KΩ théorique ) coté Arduino ( 5v ) ligne SCL ( câble de 5m )
Ouvrer le document réponse_Etude Dynamique ele pour répondre à cette partie.
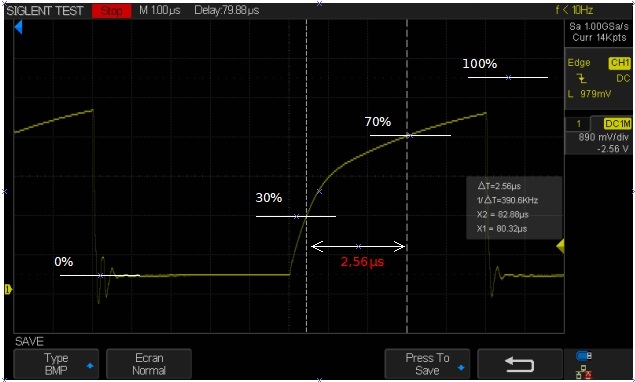
Les valeurs des résistors de pull-up permettront de régler les paramètres "statique et dynamique" du bus I2C.
L'étude dynamique permet de déterminer la valeur maximale des résistors de pull-up: Rp
4.1: Analyse des valeurs dynamiques du bus I2C
La valeur maximale du résistor Rp dépendra de la constante de temps des lignes SDA et SCL.
La communication sur le bus I2C doit respecter des contraintes temporelles, cela correspond aux paramètres dynamiques du bus.
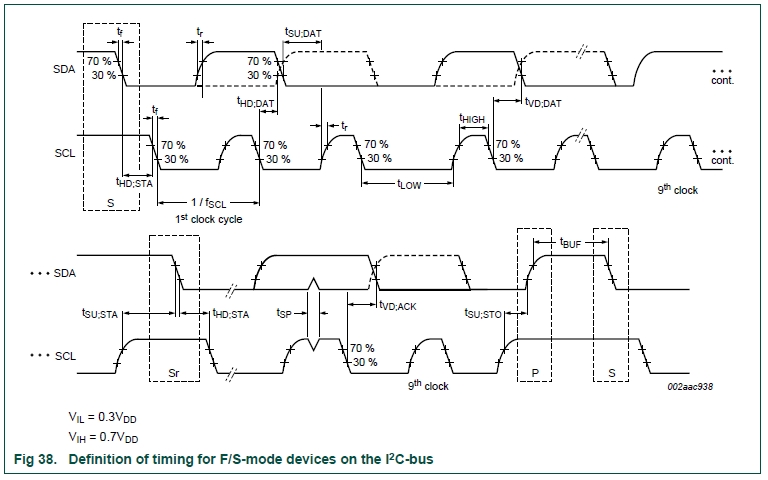
Sur les chronogrammes suivants 2 temps sont particulièrement à mesurer : tf et tr des lignes SDA et SCL.
tr = « rise time » temps de monté ou front montant
tf = « fall time » temps de descente ou front descendant
Les temps tf et tr sont mesurés entre 30% et 70% de la valeur finale sur les lignes SDA ou SCL.
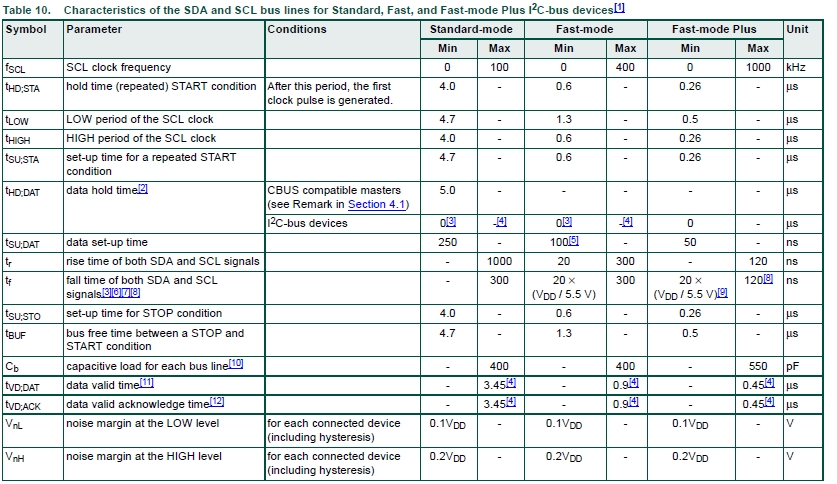
Relever dans la documentation du bus I2C les valeurs maximales de ces deux paramètres : tf et tr :
Entourer les valeurs sur le document réponse
Les fronts montants et descendant dépendent de la constante de temps des lignes du bus.
La constante de temps ( ) est obtenue par le produit de la résistance de pull-up Rp multiplié par la capacité de la ligne Cl.
) est obtenue par le produit de la résistance de pull-up Rp multiplié par la capacité de la ligne Cl.
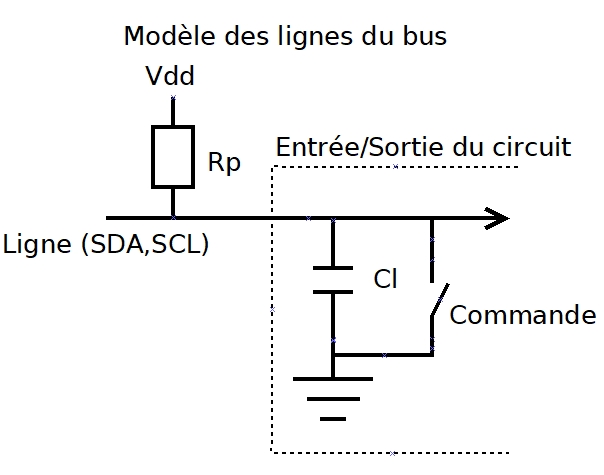
La capacité Cl (capacité de liaison des lignes SDA et SCL) ne peut excéder 400pF !
Hypothèse Cl = 30pF
Calculer la valeur de la constante de temps ( ) des lignes SDA et SCL du montage :
) des lignes SDA et SCL du montage :
Vous utiliserez les valeurs réelles mesurées obtenues dans l'étude statique !
Faire les calculs sur le document réponse
1 Pour la carte Raspberry :

2 Pour la carte Arduino :

4.2: Relever les fronts « montant et descendant » de la ligne SDA à l’oscilloscope.
Pour effectuer les relevés des temps de monté et descente de la ligne SDA, il faut dé calibrer la voie de l’oscilloscope pour faire correspondre la variation du signal de 0 à100% (souvent indiqué sur l’écran de l’oscilloscope).
Les temps seront à mesurer entre 30% et 70% de la valeur finale, comme indiqué dans la documentation fig38 page précédente.
On cherche à déterminer la valeur maximale du résistor Rp qui répond aux contraintes temporelles des temps tf et tr. Pour régler la constante de temps (régler Rp), il est souhaitable d’utiliser une boite à décade afin d’obtenir rapidement une valeur maximale pour la résistance de pull-up.
Toutes les valeurs obtenues dépendent de la longueur de ligne que vous avez réalisée. Si votre ligne est très longue, que les mesures des temps ne correspondent pas aux critères temporels du bus i2c, il faudra utiliser des drivers de ligne de type (exemple) : P82B715 I2C Bus Extender (voir Activité : ressources complémentaires)
Coté Arduino 5V
Coller une image (par essai) de l’écran de votre oscilloscope pour chaque relevé dans le document réponse
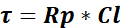
4.21 : Mesure de tr (rise time) front montant
J'ai effectué trois essais pour le temps de monté (deux suffises) pour bien montrer l'évolution du temps de monté en fonction de la valeur de Rp
Premier essai
Le résistor Rp=5KΩ (RN1C//R10)
Conclusion : avec t r=2,56µs (2560ns) on n’est pas assez rapide (tr<1µs)
Si le relevé précédent ne correspond pas aux attentes, proposer une autre valeur de Rp.
Pour déterminer la valeur adéquate du résistor Rp on va utiliser une boite à décade montée en parallèle sur ce résistor.
Modifier la valeur de Rp pour répondre au contrainte temporelles de tr en ajustant vote boite à décade.
Le résistor Rp= ? KΩ ( RN1C // R10 // Rbd) avec Rbd = valeur de la boite à décade (KΩ)
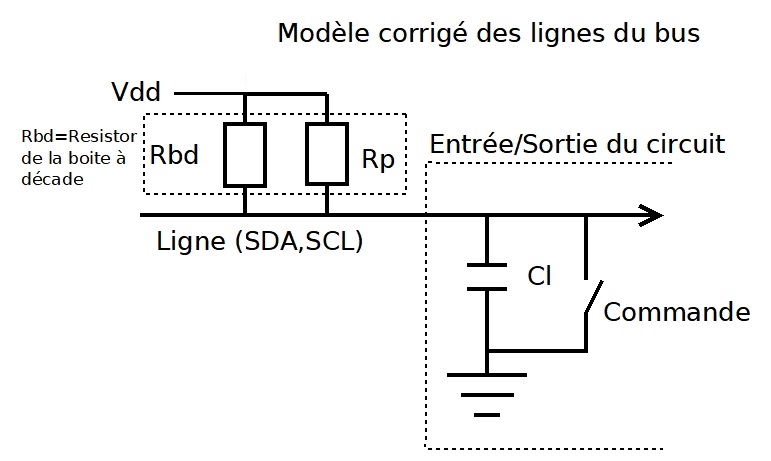
Deuxième essai (Facultatif,avec un résistor fixe de 4,7KΩ)
On ajoute en parallèle sur le résistor Rp un résistor de 4,7KΩ
soit (10KΩ // 10KΩ // 4,7KΩ)
On obtient un résistor théorique de valeur Rp=2,42KΩ
Avec t r=1,34µs (1340ns) on n’est toujours pas assez rapide tr<1µs
On doit diminuer la valeur du résistor Rp=2,42KΩ
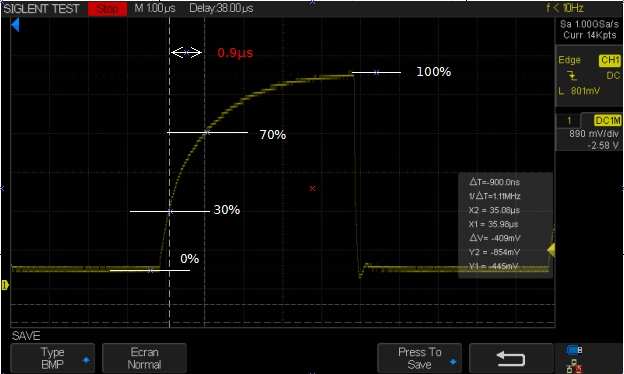
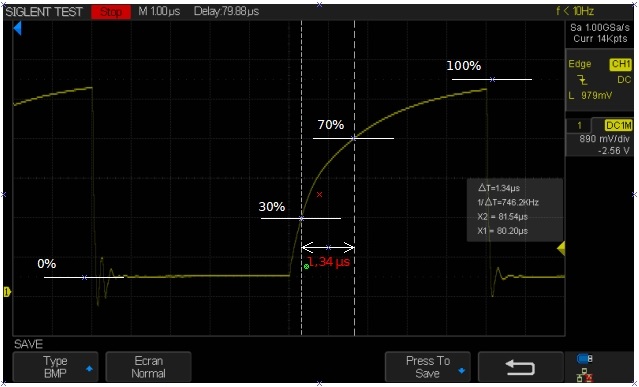
Troisième essai : Réglage boite à décade 2,85 KΩ (remplacé par un résistor de 2,7KΩ Normalisé)
On ajoute en parallèle sur le résistor Rp un résistor de Rbd = 2,7KΩ soit (10KΩ // 10KΩ // 2,7KΩ)
On obtient un résistor théorique de valeur Rp=1,753KΩ
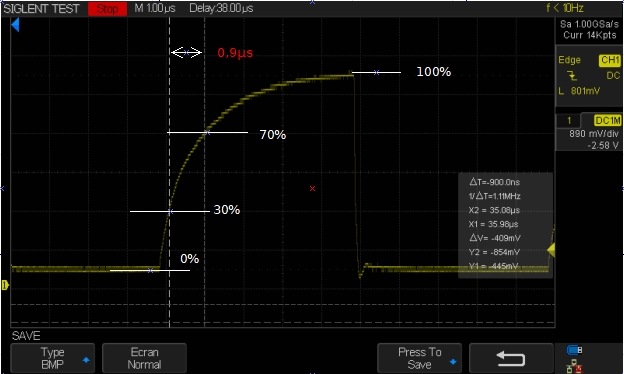
Avec t r=0,9µs (900ns) on respecte la condition tr<1µs
4.22 : Mesure de tf (fall time) front descendant
Rp=1,753KΩ = ( RN1C // R10 // Rbd)
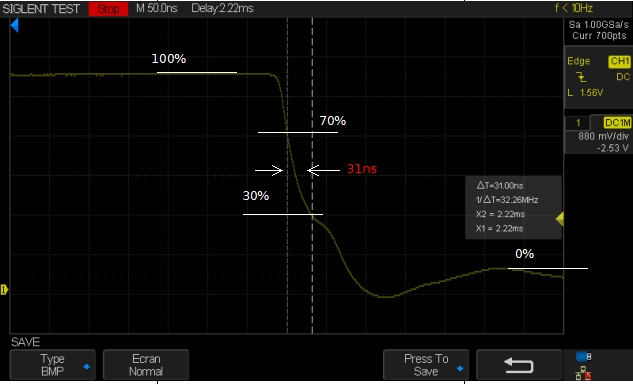
Avec t f=0,031µs (31ns) on respecte la condition tf<0,3µs
Coté Raspberry 3,3V
Coller une image (par essai) de l’écran de votre oscilloscope pour chaque relevé dans le document réponse
4.23 : Mesure de tr (rise time) front montant
Le résistor Rp=1,52KΩ (R2//R24)
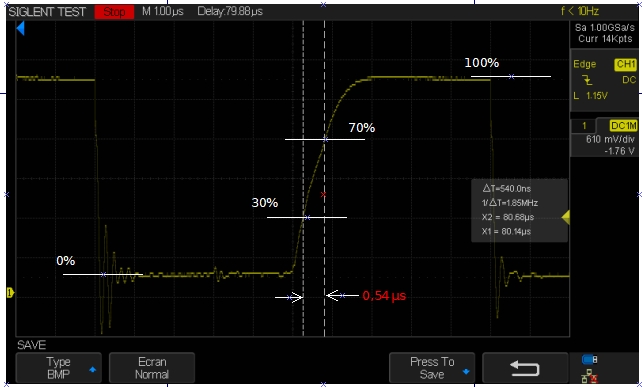
Avec t r=0,54µs (540ns) on respecte la condition tr<1µs
4.24 : Mesure de tf (fall time) front descendant
Le résistor Rp=1,52KΩ (R2//R24)
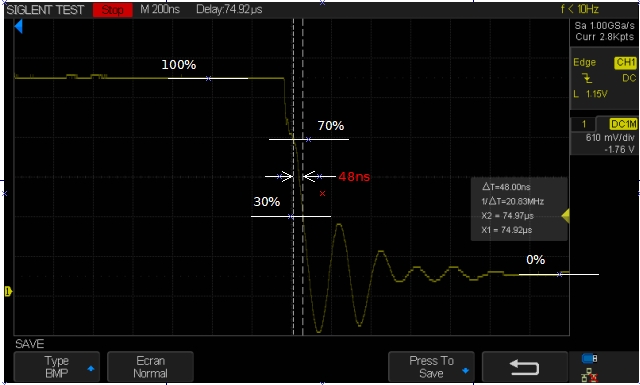
Avec t f=0,048µs (48ns) on respecte la condition tf<0,3µs
4.3 : Compléter le tableau dans le document réponse avec les valeurs mesurées des fronts montant et descendant et conclure.

Conclusions :
Conclure sur les valeurs temporelles tf et tr obtenues.
Si vos relevés présentent une incompatibilité temporelle, proposer une solution pour y remédier.
Créé avec HelpNDoc Personal Edition: Créer des fichiers d'aide pour la plateforme Qt Help